

一、产品介绍智能PID调节控制器
人工智能温控器/调节仪采用真正的人工智能算式,仪表启动自整定功能,可以根据被控对象的特性,自动寻找参数以达到很好的控制效果,无需人工整定参数。控温精度基本达±0.1℃,无超调、欠调,达*水平。可与各类传感器、变送器配合使用,实现对温度、压力、液位、容量、力等物理量的测量显示,并配合各种执行器对电加热设备和电磁、电动阀进行PID调节和控制、报警控制、数据采集等功能。适用于工业炉,电炉,烘箱,试验设备,制鞋机械,注塑机械,包装机械,食品机械,印刷机械等行业。智能PID调节控制器
仪表具有多种输入类型,一台仪表可以配接不同的输入信号,大大减少了备表的数量。仪表可选择单组PID控制或两组PID运算控制(如加热/冷却控制系统)。PID控制输出可选:电流、电压、SSR固态继电器、单/三相SCR过零触发、阀门正反转控制等多种方式。可附加位式报警控制、模拟变送输出、RS485/232通讯等功能。
二、技术参数
| 输入 | ||||
| 输入信号 | 电流 | 电压 | 电阻 | 电偶 |
| 输入阻抗 | ≤250Ω | ≥500KΩ | ||
| 输入电流大限制 | 30mA | |||
| 输入电压大限制 | <6V | |||
| 输出 | ||||
| 输出信号 | 电流 | 电压 | 继电器 | 24V配电或馈电 |
| 输出时允许负载 | ≤500Ω | ≥250KΩ (注:需要更高负载能力时须更换模块) | AC220V/0.5A(小) DC24V/0.5A(小) AC220V/2A(大) DC24V/2A(大) 见备注 | ≤30mA |
| 调节输出 | ||||
| 控制输出 | 继电器 | 单相可控硅 | 双相可控硅 | 固态继电器 |
| 输出负载 | AC220V/0.5A(小) DC24V/0.5A(小) AC220V/2A(大) DC24V/2A(大) 见备注 | AC660V/0.1A | AC600V/5A (如果直接驱动 必须注明) | DC12V/30mA |
| 综合参数 | ||||
| 测量精度 | 0.2%FS±1字 | |||
| 设定方式 | 面板轻触式按键数字设定;参数设定值密码锁定;设定值断电保存。 | |||
| 显示方式 | LED红/绿数码管双排显示或LED红/绿数码管双排显示+51段LED光柱显示 | |||
| 使用环境 | 环境温度:0~50℃;相对湿度:≤85%RH; 避免强腐蚀气体。 | |||
| 工作电源 | AC 100~240V(开关电源) (50-60HZ); DC 20~29V (开关电源)。 | |||
| 功耗 | ≤5W | |||
| 结构 | 标准卡入式 | |||
| 通讯 | 采用标准MODBUS通讯协议,RS485通讯距离可达1公里;RS232通讯距离可达:15米。 注:仪表带通讯功能时,通讯转换器有源转换器 | |||
备注:外形尺寸为D、E的仪表继电器输出时允许负载能力为AC220V/0.6A,DC24V/0.6A。
三、仪表的面板及显示功能

1)仪表外形尺寸及开孔尺寸
| 外形尺寸 | 开孔尺寸 | 外形尺寸 | 开孔尺寸 |
| 160*80mm(横式/光柱) | 152*76mm | 96*48mm(横式) | 92*45mm |
| 80*160mm(竖式/光柱) | 76*152mm | 48*96mm(竖式) | 45*92mm |
| 96*96mm(方式/光柱) | 92*92mm | 72*72mm(方式) | 68*68mm |
| 48*48mm(方式) | 45*45mm |
2)显示窗
PV显示窗:显示测量值;在参数设定状态下, 显示参数符号
SV显示窗:手动状态下显示PID运算结果;自动状态下的显示内容可通过二级菜单中的DISP进行定义; 参数设置状态下显示设定参数值
3)面板指示灯
A/M:手/自动切换指示灯
EV1:事件报警指示灯
AL1:报警指示灯
AL2:第二报警指示灯
OP1:输出指示灯(正转)
OP2:输出指示灯(反转)
OP3:输出指示灯
OP4:输出指示灯
4) 操作按键
  | 确认键:数字和参数修改后的确认 翻页键:参数设置下翻键 退出设置键:长按2秒可返回测量画面 配合  键可实现自动/手动控制输出的切换 键可实现自动/手动控制输出的切换 |
  | 位移键:按一次数据向左移动一位 返回键:长按2秒可返回上一个参数 |
  | 减少键:用于减少数值 带打印功能时,显示时间 在点动输出时,可以实现阀位点动关小 |
  | 增加键:用于增加数值 带打印功能时,用于手动打印 在点动输出时,可以实现阀位点动开大 |
5)标准配线
仪表在现场布线注意事项:
PV输入(测量输入)
1、减小电气干扰,低压直流信号和传感器输入的连线应远离强电走线。如果做不到应采用屏蔽导线,并在一点接地。
2、在传感器与端子之间接入的任何装置,都有可能由于电阻或漏电流而影响测量精度。
热电偶或高温计输入
应采用与热电偶对应的补偿导线作为延长线,采用带屏蔽层保护的补偿导线
RTD(热电阻)输入
三根导线的线阻抗必须相等,并且线阻抗不可超过15Ω;若使用导线未满足以上其中一个要求将
导致热电阻测量偏差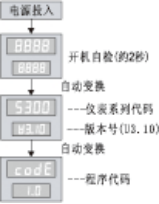
四、通电设置
仪表接通电源后进入自检(见右图),自检完毕后,仪表自动转入工作状态,
在工作状态下,按压 键显示LOC,LOC参数设置如下:
键显示LOC,LOC参数设置如下:
1. 1) Loc等于任意参数可进入一级菜单(LOC=00;132时无禁锁);
2) Loc=132,按压 键4秒可进入二级菜单;
键4秒可进入二级菜单;
3) Loc=130,按压 键4秒可进入时间设置菜单,对于带打印功能的表;
键4秒可进入时间设置菜单,对于带打印功能的表;
4) Loc等于其它值,按压 键4秒退出到测量画面。
键4秒退出到测量画面。
2.如果Loc=577,在Loc菜单下,同时按住 键和
键和 键达4秒,可以将仪
键达4秒,可以将仪
表的所有参数恢复到出厂默认设置。
3.在其它任何菜单下,按压 键4秒可退出到测量画面。
键4秒可退出到测量画面。
4、时间设定
在仪表PV显示测量值的状态下,按压"  "键进入参数,设定LOC=130,在PV显示LOC,SV显示130的状态下,按压"
"键进入参数,设定LOC=130,在PV显示LOC,SV显示130的状态下,按压"  "键4秒,即进入时间参数设定,仪表PV显示"d=14",SV显示"1009"表示当前日期2014年10月09日,在此状态下,可参照仪表参数设定方法,设定当前日期。在仪表当前日期显示状态下,按压"
"键4秒,即进入时间参数设定,仪表PV显示"d=14",SV显示"1009"表示当前日期2014年10月09日,在此状态下,可参照仪表参数设定方法,设定当前日期。在仪表当前日期显示状态下,按压"  "键,仪表PV显示"T=15",SV显示"3045"表示当前时间15点30分45秒,在此状态下,可参照仪表参数设定方法,设定当前时间。在仪表当前时间显示状态下,再次按压"
"键,仪表PV显示"T=15",SV显示"3045"表示当前时间15点30分45秒,在此状态下,可参照仪表参数设定方法,设定当前时间。在仪表当前时间显示状态下,再次按压"  "键4秒,则退出时间设定,回至PV测量值显示状态。
"键4秒,则退出时间设定,回至PV测量值显示状态。
★返回工作状态
1.手动返回:在仪表参数设定模式下,按压  键4秒后.仪表即自动回到实时测量状态。
键4秒后.仪表即自动回到实时测量状态。
2.自动返回:在仪表参数设定模式下,不按任何按键,30秒后,仪表将自动回到实时测量状态。
五、参数设置
5.1 一级参数设置
在工作状态下,按压 键PV显示LOC,SV显示参数数值:按
键PV显示LOC,SV显示参数数值:按 或
或 键来进行设置,长按
键来进行设置,长按 键2秒可返回上一级参数,Loc等于任意参数可进入一级参数。
键2秒可返回上一级参数,Loc等于任意参数可进入一级参数。
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
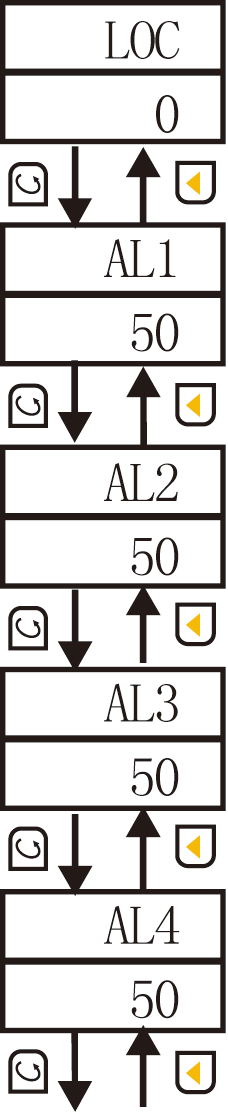 | 设定参数禁锁 | 0~999 | LOC=00:无禁锁(一级参数可修改) LOC≠00,132:禁锁(一级参数不可修改) LOC=132:无禁锁(一级参数、二级参数可修改) |
 报警值 | -1999~9999 | 报警的报警设定值 | |
 第二报警值 | -1999~9999 | 第二报警的报警设定值 | |
 第三报警值 | -1999~9999 | 第三报警的报警设定值 | |
 第四报警值 | -1999~9999 | 第四报警的报警设定值 |
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
| 返回到初始画面LOC | 控制环断线/短路报警 | 1~9999(S) | 当仪表控制输出量等于PIDL或PIDH,并且连续时间大于 LBA设定时间,而PV测量值无变化,则判断为控制环故 障,输出报警。(设定LBA报警时有此参数) |
 报警回差 | 0~9999 | 报警的回差值 | |
 第二报警回差 | 0~9999 | 第二报警的回差值 | |
第三报警回差 | 0~9999 | 第三报警的回差值/位式控制回差值 | |
 第四报警回差 | 0~9999 | 第四报警的回差值 | |
 比例带 | 1~9999 | 显示比例带的设定值(P值越小,系统响应越快;P值越大, 系统响应越慢) | |
 积分时间 | 1~9999(×0.5S) | 显示程序积分时间的设定值,用于解除比例控制所产生的 残留偏差。I值越小,积分作用增强;I值越大,积分作用 相应减弱。设定为(9999)时,积分作用为OFF。 | |
 微分时间 | 0~1999(×0.5S) | 显示程序微分时间的设定值,D值越小,系统微分作用越弱; D值越大,系统微分作用越强;设定为0时,微分动作则成 OFF;用于预测输出的变化,防止扰动,提高控制的稳定性。 | |
 输出周期 | 1~200(×0.5S) 精度:10mS | 控制输出的周期 (开关量控制输出时有此参数) | |
| 输出抑制参数 | 0.00~1.00 | 越大抑制越强:当SF=1.00抑制,当SF=0.00抑制消取 (详见7.5关于SF参数的使用注解) | |
| 辅助输出比例带 | 1~9999 | 显示辅助输出比例带的设定值(P值越小,系统响应越快;P值 越大,系统响应越慢)(见备注1) | |
| 辅助输出 积分时间 | 1~9999(×0.5S) | 显示辅助输出积分时间的设定值,用于解除比例控制所产生的 残留偏差。I值越小,积分作用增强;I值越大,积分作用相应 减弱。设定为(9999)时,积分作用为OFF。(见备注1) | |
| 辅助输出 微分时间 | 0~1999(×0.5S) | 显示辅助输出微分时间的设定值,D值越小,系统微分作用越 弱;D值越大,系统微分作用越强;设定为0时,微分动作则 成OFF;用于预测输出的变化,防止扰动,提高控制的稳定性。 (见备注1) | |
| 辅助输出周期 | 1~200(×0.5S) 精度:10mS | 辅助输出的周期(见备注1) (开关量控制输出时有此参数) | |
| 辅助输出 输出抑制参数 | 0.00~1.00 | 辅助输出抑制积分作用以减少超调,1.00抑制作用, 0.00没有抑制作用(详见7.5关于SF参数的使用注解) (见备注1) | |
 自整定 | 0~1 | Aut=0-关:手动设定PID参数值 Aut=1-开:自动演算(自整定) (参见7.3说明) |
5.2控制目标值SV的设定
在测量状态下,按住  键不放,4秒钟后,即进入控制目标值SV的设定状态。
键不放,4秒钟后,即进入控制目标值SV的设定状态。
| 参数 | 符号 | 名称 | 设定范围 | 说明 | 出厂预设值 |
| SV | 控制目标值 | 全量程 | 显示控制目标值的设定值 | 500或50.0 |
5.3 二级参数设置
在实时测量画面下,按压  键PV显示LOC,SV显示参数数值:按
键PV显示LOC,SV显示参数数值:按 或
或 键来进行设置,长按
键来进行设置,长按  键2秒可返回上一个参数,当Loc=132时,按压
键2秒可返回上一个参数,当Loc=132时,按压  键4秒,可进入二级参数。
键4秒,可进入二级参数。
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
 输入分度号 | 0~35 | 设定输入分度号类型(见输入信号类型表) | |
| 小数点 | 0~3 | dP=0:无小数点 dP=1:小数点在十位(显示XXX.X) dP=2:小数点在百位(显示XX.XX) dP=3:小数点在千位(显示X.XXX) | |
| 报式 | 0~8 | ALM1=0:无报警 ALM1=1:报警为下限报警 ALM1=2:报警为上限报警 ALM1=3:报警为偏差外报警 ALM1=4:报警为偏差内报警 ALM1=5:报警为上偏差报警 ALM1=6:报警为下偏差报警 ALM1=7:报警为LBA报警(1-9999S) ALM1=8:报警为手自动状态输出 | |
| 第二报式 | 0~8 | ALM2=0:无报警 ALM2=1:第二报警为下限报警 ALM2=2:第二报警为上限报警 ALM2=3:第二报警为偏差外报警 ALM2=4:第二报警为偏差内报警 ALM2=5:第二报警为上偏差报警 ALM2=6:第二报警为下偏差报警 ALM2=7:第二报警为LBA报警(1-9999S) ALM2=8:第二报警为手自动状态输出 | |
| 第三报式 | 0~9 | ALM3=0:无报警 ALM3=1:第三报警为下限报警 ALM3=2:第三报警为上限报警 ALM3=3:第三报警为偏差外报警 ALM3=4:第三报警为偏差内报警 ALM3=5:第三报警为上偏差报警 ALM3=6:第三报警为下偏差报警 ALM3=7:第三报警为LBA报警(1-9999S) ALM3=8:第三报警为手自动状态输出 ALM3=9:第三报警为正转输出 |
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
| 第四报式 | 0~9 | ALM4=0:无报警 ALM4=1:第四报警为下限报警 ALM4=2:第四报警为上限报警 ALM4=3:第四报警为偏差外报警 ALM4=4:第四报警为偏差内报警 ALM4=5:第四报警为上偏差报警 ALM4=6:第四报警为下偏差报警 ALM4=7:第四报警为LBA报警(1-9999S) ALM4=8:第四报警为手自动状态输出 ALM4=9:第四报警为反转输出 | |
| 闪烁报警 | 0~1 | ALG=0无闪烁报警 ALG=1带闪烁报警 | |
| 滤波系数 | 0~19次 | 设置仪表滤波系数防止显示值跳动(见仪表参数说明2) | |
| 设备号 | 0~250 | 设定通讯时本仪表的设备代号 | |
| 通讯波特率 | 0~4 | Baud=0:通讯波特率为1200bps; Baud=1:通讯波特率为2400bps Baud=2:通讯波特率为4800bps; Baud=3:通讯波特率为9600bps Baud=4:通讯波特率为19200bps | |
 报警打印功能 | 0~1 | Pt-A=0:无报警打印功能 Pt-A=1:有报警打印功能(无打印功能时,无此参数) | |
 定时打印间隔时间 | 1~2400分 | 设定定时打印的间隔时间 (无打印功能时,无此参数) | |
 打印单位 | 0~45 | 参见单位设定功能代码表(无打印功能时,无此参数) | |
 PID作用方式 | 0~1 | Mode=0:正作用 Mode=1:反作用 | |
| 加热冷却模式 | 0~1 | H-C=0:标准模式(单PID调节) H-C=1:加热/冷却双输出(双PID调节) (注:当H-C=1时,算式类型不可选择位式控制) | |
| PID输出类型 | 0~2 | Out=0:继电器、SSR(固态继电器控制输出)、SCR-可控硅过零触发 Out=1:电流、电压控制输出 Out=2:阀位正反转控制输出(此时第三报警不能使用) | |
| 冷却输出类型 (H-C=1时才有) | 0~1 | Out2=0:继电器、SSR(固态继电器控制输出) SCR-可控硅过零触发(此时第四报警不能使用) Out2=1:线性电流(电压)输出 注:当out=2,即主输出为阀位正反转控制输出时,out2只能模拟量输出 | |
| PID输出显示 | 0~5 | disp=0:SV光柱显示控制目标值 SV数字显示控制目标值 disp=1:SV光柱显示控制目标值 SV数字显示PID运算结果 disp=2:SV光柱显示控制目标值 SV数字显示阀位反馈值 disp=3:SV光柱显示PID运算结果 SV数字显示控制目标值 disp=4:SV光柱显示PID运算结果 SV数字显示PID运算结果 disp=5:SV光柱显示PID运算结果 SV数字显示阀位反馈值 |
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
 算式类型 | 0~2 | PID=0:人工智能算式,适用于滞后大,控制速度比较缓慢的控制 系统,如电炉的加热 PID=1:人工智能算式,适用于控制响应速度迅速的系统,如调节 阀对压力、流量等物理量的控制系统 PID=2:位式控制 | |
| 控制方式选择 | 0~2 | ctrl=0:单路输入PID控制 ctrl=1:双路输入阀位控制 ctrl=2:双路输入外给定控制 | |
 阀位行程时间 | 0~200 | 阀位行程时间,从全闭到全开所需时间 (Out=2时有此参数) | |
 正反转手动控制方式 | 0~1 | Sd=0:触点输出 Sd=1:点动输出(Out=2且ctrl=1时有此参数) | |
 阀位控制输出回差值 | 0.5~10.0% | 正反转阀位反馈控制:阀位控制输出回差值; 正反转无反馈控制:阀位控制死区,例如死区为2%, 当输出变化大于2%时,PID才输出新的值;(Out=2时有此参数) | |
 上电手/自动状态 | 0~2 | PO=0:上电初始状态为手动状态 PO=1:上电初始状态为自动状态 PO=2:上电初始状态为断电前的状态,即断电前如果是手 动状态,那么上电后也为手动状态;反之,就为自动状态 | |
| PID控制输出下限 | -100~ | PID控制输出下限幅值(见注1) 设置0~时,表示加热制冷模式选择为标准模式,单PID调节 中作为限制调节输出小值 设置-100~-1%时,仪表作为一个双PID控制系统,具备加热/制冷 双输出功能,当主控制输出用于加热,那么辅助输出用于制冷 | |
 PID控制输出上限 | -100~ | PID控制输出上限幅值(见注1) 设置-100~-1%时,仪表成为一个单向输出系统,主控制输出不 工作 | |
| 输入的零点迁移 | 全量程 | 输入零点的迁移量(见注2) | |
| 输入的量程比例 | 0~1.999倍 | 输入量程的放大比例(见注2) | |
| 冷端补偿的零点迁移 | 全量程 | 冷端补偿的零点迁移量(热电偶输入时,有此参数) (见注2) | |
| 冷端补偿的放大比例 | 0~1.999倍 | 冷端补偿的放大比例(热电偶输入时,有此参数) (见注2) | |
 控制输出的零点迁移 | 0~1.2 | 控制输出的零点迁移量(见注3) | |
| 控制输出的放大比例 | 0~1.2 | 控制输出的放大比例(见注3) | |
| 模拟量输出2的零点迁移 | 0~1.2 | 模拟量输出2的零点迁移量(见注3) |
| 出厂设置 | 参数 | 设定范围(字) | 说明 |
| 返回到初始画面Pn | 线性输出2的放大比例 | 0~1.2 | 线性输出2的放大比例(见注3) |
| 变送输出量程下限 | 全量程 | 变送输出的下*程 | |
| 变送输出量程上限 | 全量程 | 变送输出的上*程 | |
 闪烁报警下限 | 全量程 | 闪烁报警下*程(测量值低于设定值时,显示测量值并闪烁, ALG=1时有此功能) | |
| 闪烁报警上限 | 全量程 | 闪烁报警上*程(测量值高于设定值时,显示测量值并闪烁, ALG=1时有此功能) | |
 PV光柱显示下限 | 全量程 | PV光柱显示的下*程值(光柱表时有用) | |
| PV光柱显示上限 | 全量程 | PV光柱显示的上*程值(光柱表时有用) | |
| 测量量程下限 | 全量程 | 设定输入信号的测量下*程(见注4) | |
| 测量量程上限 | 全量程 | 设定输入信号的测量上*程(见注4) | |
| 小信号切除 | 0.0~100.0 | 设定输入信号的小信号切除量(输入信号小于设定的百分比时, 显示为0,本功能仅对电压、电流信号有效) | |
| SV输入分度号 | 0~35 | 输入分度号类型(单路输入PID控制仪无以下参数) | |
| SV显示小数点 | 0~3 | F-dp=0:无小数点 F-dp=1:小数点在十位(显示XXX.X) F-dp=2:小数点在百位(显示XX.XX) F-dp=3:小数点在千位(显示X.XXX) | |
 滤波系数 | 0~19 | 设置仪表滤波系数防止显示值跳动 | |
| SV显示输入零点迁移 | 全量程 | 设定SV显示输入零点的迁移量 | |
| SV显示输入量程放大比例 | 0~1.999倍 | 设定SV显示输入量程的放大比 | |
 SV测量量程的下限 | 全量程 | 设定SV输入信号的测量下*程(注4) | |
 SV测量量程的上限 | 全量程 | 设定SV输入信号的测量上*程(注4) |
注1:PIDL、PIDH的定义:PIDL、PIDH等于仪表控制输出的上下限幅值
如:设定PIDL=10%,则仪表控制输出量小为:10%。设定PIDH=90%,则仪表控制输出量大为:90%,
注2:Pb、Pk、Cb、Ck的计算公式:
Pk=预定全量程÷显示量程×原Pk; Pb=预定量程下限-显示量程下限×Pk+原Pb;
例:一直流电流4-20mA仪表,测量量程为:-200-100KPa,现作校对时发现输入4mA时显示-202,输入20mA时显示1008。(仪表设定:Pb=0,Pk=1)
根据公式:Pk=预定全量程÷显示全量程×原Pk
Pk=[1000-(-200)]÷[1008-(-202)]×1=1200÷1210×1≈0.992
Pb=预定量程下限-显示量程下限×Pk+原Pb
Pb=-200-(-202×0.992)+0=-200-(-200.384)=0.384
现设定:Pb=0.384; Pk=0.992
注3:输出迁移Oub、OuK、Ctb、Ctk,设置如下:
仪表变送及控制输出以0~20mA或0~5V校对,如欲更改输出量程或输出偏差调整,可以利用以下公式实现。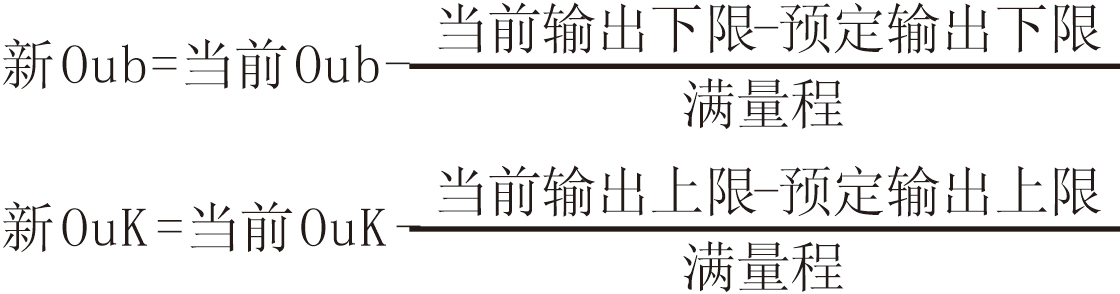
公式中,当输出为电流信号,满量程=20,当输出为电压信号,满量程=5。
例1:变送电流0~20mA输出,现欲改为4~20mA输出。测量时,输出零点值输出为0mA,输入满量程时输出为20mA,当前Oub=0,当前OuK=1。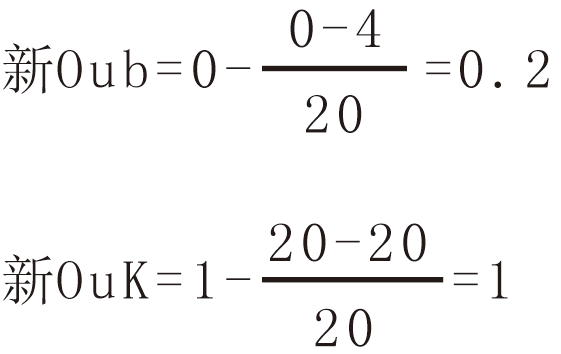
所以,将Oub设置为0.2,OuK不变,就实现了从0~20mA输出改为4~20mA输出了。
注4:量程:PL、PH、F-L、F-H的设定如下:
例:一直流电流输入仪表,原量程为0-500Pa,欲将量程改为:-100.0~500.0Pa
设定:DP=1(小数点在十位),PL=-100.0,PH=500.0。按确认键,量程更改完毕。
注5:程序内部阀门类型固定按带限位开关操作,若PID运算结果保持0%或者不变,那么反转或正转的开关量
输出在执行完一个行程时间后,开关量将保持输出,此时对应的指示灯灭;无反馈的正反转阀门控制,仪表在开
机运行时会进行一次阀门定位工作,反转开关量执行一次全关动作。
注6:信号断线时,PID运算结果将变成小,此时无法执行自整定操作。
★输入信号类型表:
| 分度号Pn | 信号类型 | 测量范围 | 分度号Pn | 信号类型 | 测量范围 |
| 0 | 热电偶B | 400~1800℃ | 18 | 0~350Ω远传电阻 | -1999~9999 |
| 1 | 热电偶S | 0~1600℃ | 19 | 30~350Ω远传电阻 | -1999~9999 |
| 2 | 热电偶K | 0~1300℃ | 20 | 0~20mV | -1999~9999 |
| 3 | 热电偶E | 0~1000℃ | 21 | 0~40mV | -1999~9999 |
| 4 | 热电偶T | -200.0~400.0℃ | 22 | 0~100mV | -1999~9999 |
| 5 | 热电偶J | 0~1200℃ | 23 | -20~20mV | -1999~9999 |
| 6 | 热电偶R | 0~1600℃ | 24 | -100~100mV | -1999~9999 |
| 7 | 热电偶N | 0~1300℃ | 25 | 0~20mA | -1999~9999 |
| 8 | F2 | 700~2000℃ | 26 | 0~10mA | -1999~9999 |
| 9 | 热电偶Wre3-25 | 0~2300℃ | 27 | 4~20mA | -1999~9999 |
| 10 | 热电偶Wre5-26 | 0~2300℃ | 28 | 0~5V | -1999~9999 |
| 11 | 热电阻Cu50 | -50.0~150.0℃ | 29 | 1~5V | -1999~9999 |
| 12 | 热电阻Cu53 | -50.0~150.0℃ | 30 | -5~5V | -1999~9999 |
| 13 | 热电阻Cu100 | -50.0~150.0℃ | 31 | 0~10V(不可切换) | -1999~9999 |
| 14 | 热电阻Pt100 | -200.0~650.0℃ | 32 | 0~10mA开方 | -1999~9999 |
| 15 | 热电阻BA1 | -200.0~600.0℃ | 33 | 4~20mA开方 | -1999~9999 |
| 16 | 热电阻BA2 | -200.0~600.0℃ | 34 | 0~5V开方 | -1999~9999 |
| 17 | 0~400Ω线性电阻 | -1999~9999 | 35 | 1~5V开方 | -1999~9999 |
★单位设定功能代码表:
| 代码 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 单位 | Kgf | Pa | KPa | MPa | mmHg | mmH2O | bar | ℃ | % | Hz | m | t |
| 代码 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 |
| 单位 | l | m³ | Kg | J | MJ | GJ | Nm³ | m/h | t/h | l/h | m³/h | kg/h |
| 代码 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 |
| 单位 | J/h | MJ/h | GJ/h | Nm³/h | m/m | t/m | l/m | m³/m | kg/m | J/m | MJ/m | GJ/m |
| 代码 | 36 | 37 | 38 | 39 | 40 | 41 | 42 | 43 | 44 | 45 | ||
| 单位 | Nm³/m | m/s | t/s | l/s | m³/s | kg/s | J/s | MJ/s | GJ/s | Nm³/s |
双路输入(阀位控制)PID温控器/调节仪接线图
规格尺寸为A、B、C、D、E、K、L、M型接线图
注:横竖式仪表后盖接线端子方向不一样,见示意图1
规格尺寸为F型接线图
注: 外形代码为F的电压、电流输入必须通过短路环切换
J1、J2为路输入信号切换位置
J3、J4为第二路(外给定或阀位反馈)
输入信号切换位置
七、调节设置
7.1 报警设置
1.报警输出(AL1、AL2、AH1、AH2)
★关于回差:
本仪表采用报警输出带回差,以防止输出继电器在或报警输出临界点上下波动时频繁动作。
具体输出状态如下:
★测量值由低上升时: ★测量值由高下降时:
★位式上限报警输出: ★位式下限报警输出:
偏差内报警输出 偏差外报警输出
7.2 自动/手动无扰动切换方法
在仪表自动控制输出状态下,同时按压  键和
键和  键,仪表将自动跟踪输出量,A/M指示灯 (红)亮,即已完成自动/手动无扰动切换,此时可按
键,仪表将自动跟踪输出量,A/M指示灯 (红)亮,即已完成自动/手动无扰动切换,此时可按  或
或  键手动改变仪表输出量的百分比(范围:0~)。
键手动改变仪表输出量的百分比(范围:0~)。
手动状态下,仪表PV显示:实时测量值; SV显示:仪表输出量的百分比。
7.3 系统PID参数和自整定自动状态
调节仪具有*PID控制算法,在控制系统设计和安装正确的前提下,控制品质的优劣往往取决于P、I、D三个参数的选择。调节仪有P、I、D参数的出厂默认值,但对于多数被控对象,默认参数并不能达到理想的控制效果,这时可以启动自整定功能。通过自整定,调节仪可以根据被控对象的特性,自动寻找参数以达到很好的控制效果:无超调、无振荡、高精度、快响应。
启动自整定方式:调节仪具备PID参数自整定功能,产品初次使用时,需启动自整定功能以确定系统控制的P、I,D控制参数。将LOC密码设置为0或者132后按 键进入一级菜单,继续按
键进入一级菜单,继续按 键找到参数Aut,将Aut由0改为1开启自整定。如图一所示整定开启后A/M灯快速闪烁表明仪表已进入自整定状态。调节仪采用ON-OFF二位式整定方法,输出0%或使系统形成振荡,然后根据系统响应曲线计算PID参数。对象时间常数越大,自整定所需时间越长,可从数秒至数小时不等。如果要提前放弃自整定,可将Aut设置成0停止自整定。自整定被停止或结束后A/M灯由闪烁变成熄灭,进入自动控制状态。在任何时候都可执行自整定,但通常只在设备初始调试阶段进行一次整定即可,但当对象特性发生了改变,则应重新进行自整定。
键找到参数Aut,将Aut由0改为1开启自整定。如图一所示整定开启后A/M灯快速闪烁表明仪表已进入自整定状态。调节仪采用ON-OFF二位式整定方法,输出0%或使系统形成振荡,然后根据系统响应曲线计算PID参数。对象时间常数越大,自整定所需时间越长,可从数秒至数小时不等。如果要提前放弃自整定,可将Aut设置成0停止自整定。自整定被停止或结束后A/M灯由闪烁变成熄灭,进入自动控制状态。在任何时候都可执行自整定,但通常只在设备初始调试阶段进行一次整定即可,但当对象特性发生了改变,则应重新进行自整定。
图一
调节仪采用真正的人工智能算式,无需人工整定参数,控温精度基本达±0.1℃,无超调、欠调,达*水平!
工作条件:
A、控制对象:一体化高温电炉(型号:SXC-1.5)
B、炉膛内放满加热材料
C、控制目标值:200.0℃
工作情况:
A、真正人工智能算式,无需人工整定参数
B、大超调0.7℃
C、到达稳定时间25分钟
D、稳定后控制精度基本达±0.1℃
图二
工作曲线:见图二
7.4 人工调整参数方法
本调节仪自整定的准确度较高,可满足绝大多数的对象要求。但当对象较复杂,例如非线性、时变、大滞后等对象,可能需要多次整定或手工调整才能达到较好的控制效果。手工调整时,观察测量曲线,若系统长时间处于振荡可增大P或减小D以消除振荡;若系统长时间不能到达目标值可减小I以加快响应速度;若系统超调过多可增加I或增加D以减小超调。调试时可进行逐试法,即将P、I、D参数之一进行增加或者减少,如果控制效果变好则继续同方向改变该参数,相反则进行反向调整,直到控制效果满足要求。7.5 超调抑制系数SF
控制输出对应PID参数的超调抑制系数SF,调整SF可使被控参数的过渡过程无超调(或欠调)。原理是提前进入比例调节,延迟进行积分调节(克服积分饱和)。SF对过渡过程的影响见图三,理论上,到达新设定值,过快的调节速度,容易产生振荡,而中间图的效果较为理想。可根据工艺时间和允许超调量,现场具体选择超调抑制系数SF(0.00~1.00),SF=0.00为常规PID,SF=1.00超调抑制作用强,速度慢。初次使用者建议采用出厂值(SF=1.00)。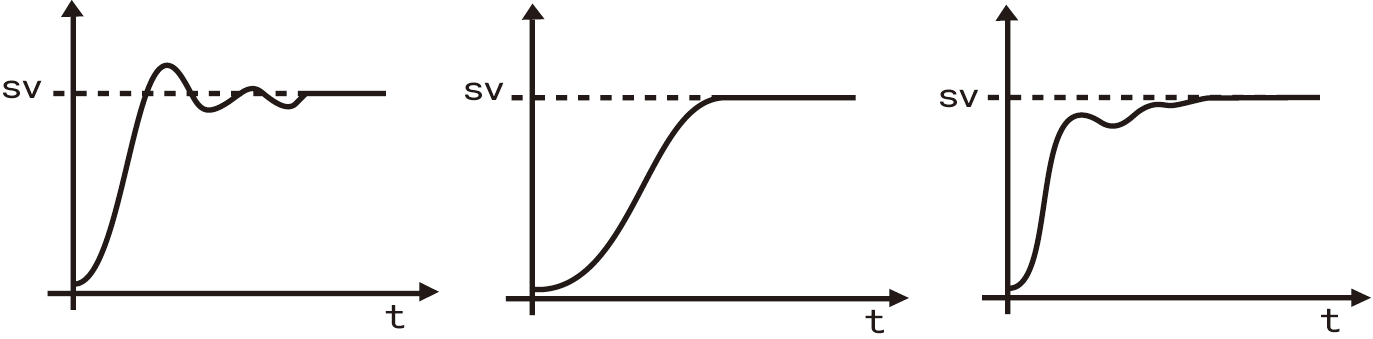
图三:有超调、振荡 无超调、无振荡漾 欠超调、过渡时间长
7.6 算式类型选择(PID)
本调节仪采用的是人工智能算式:当控制系统的滞后大,控制速度比较缓慢时,如电炉的加热,此时PID=0;
当控制系统的控制响应速度迅速,如调节阀对压力、流量等物理量的控制时,此时PID=1。
7.7 控制输出工作原理
1.模糊PID自整定工作状态
(1)自动控制状态:
仪表上电后自动处于跟踪状态,仪表采样PV输入信号,并将PV输入显示于PV显示窗上,控制目标值(或输出量的百分比)显示于SV显示窗上。
(2)手动操作状态:
当需要进行手动操作控制时,在PV显示输入值状态下,同时按压  键和
键和  键,仪表将跟随当前输出量,自动转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。此时,SV显示输出量(0~),输出值大小可按压
键,仪表将跟随当前输出量,自动转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。此时,SV显示输出量(0~),输出值大小可按压  键(增加输出量)或
键(增加输出量)或  键 (减少输出量)来调节。同时按压
键 (减少输出量)来调节。同时按压  键和
键和  键,仪表即返回自动控制输出量状态,此时仪表将跟随当前输出量,根据控制器设定参数中的积分时间,按控制逼近方法,自动跟随PV变化,转回自动控制状态。
键,仪表即返回自动控制输出量状态,此时仪表将跟随当前输出量,根据控制器设定参数中的积分时间,按控制逼近方法,自动跟随PV变化,转回自动控制状态。
2. 阀位控制状态:
仪表可接受双路的模拟输入信号,送往仪表的PVin和SVin接线端,PVin输入信号显示测量值,由PV显示器显示;SVin输入信号显示阀位反馈值,由SV显示器显示。根据用户的具体要求,仪表可输出模拟量(如0~10mA、4~20mA、0~5V、1~5V等)或其它控制信号(如阀位控制的正反转等)。
(1)自动操作状态:
仪表在自动控制输出时,将根据模糊PID控算法,当控制输出量百分比小于SV阀位反馈值时,仪表输出反转,直至控制输出量=SV阀位反馈值。当控制输出量百分比大于SV阀位反馈值时,仪表输出正转,直至控制输出量=SV阀位反馈值。
★ 当前控制输出量的大小可将仪表切换至手动状态即可查看。
(2)手动操作状态
在仪表自动跟踪状态下,同时按压  键和
键和  键,仪表将跟随当前输出量,转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。SV显示百分比输出值(0~),此时:
键,仪表将跟随当前输出量,转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。SV显示百分比输出值(0~),此时:
1)按压  键,仪表即增加输出量(输出正转),直至仪表的控制输出量=阀位反馈值后,松开
键,仪表即增加输出量(输出正转),直至仪表的控制输出量=阀位反馈值后,松开  键停止输出。
键停止输出。
2)按压  键,仪表即减少输出量(输出反转),直至仪表的控制输出量=阀位反馈值后,松开
键,仪表即减少输出量(输出反转),直至仪表的控制输出量=阀位反馈值后,松开  键停止输出。
键停止输出。
3)同时按压  键和
键和  键,仪表即返回自动控制输出量状态,此时仪表将根据实时测量值控制阀门开度大小。
键,仪表即返回自动控制输出量状态,此时仪表将根据实时测量值控制阀门开度大小。
3. 外给定控制状态:
仪表可接受双路的模拟输入信号,送往仪表的PVin和SVin接线端,PVin输入信号显示测量值,由PV显示器显示;SVin输入信号显示外给定值,由SV显示器显示。仪表的控制目标值由SVin输入信号给定,根据用户的具体要求,仪表可输出模拟量(如0~10mA、4~20mA、0~5V、1~5V等)。
(1)自动控制状态(模拟量输出)
自动上电后处于自动控制状态。仪表采样PVin输入信号,根据PID控制算法控制模拟量的输出,并将测量值显示在PV显示器上,输出量或控制目标显示在SV显示器上。
(2)手动操作状态:
当需要进行手动操作控制时,在PV显示测量值状态下,同时按压  键和
键和  键,仪表将跟随当前输出量,自动转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。
键,仪表将跟随当前输出量,自动转入手动控制输出量状态,仪表自动/手动(A/M)指示灯亮,即可实现自动/手动无扰动切换。
此时,SV显示输出量(0~),输出值大小可按压  键(增加输出量)或
键(增加输出量)或  键(减少输出量)来调节。同时按压
键(减少输出量)来调节。同时按压  键和
键和  键,仪表即返回自动控制状态。
键,仪表即返回自动控制状态。
7.7打印功能
1、手动打印
在仪表测量值显示状态下,按压  键,即打印出当前的实时测量值。
键,即打印出当前的实时测量值。
2、定时打印
当时间测定等于间隔时间时,仪表将控制打印机进行定时打印,定时打印时将打印当前。
实时测量值。打印格式为:
-------------------------
TIME PRINT
2009-04-14 ----------------------日期
21:06:15 ----------------------时间
PV= -250℃ ----------------------通道测量值
SV= 500 ----------------------控制目标值
Out= 0.0% ----------------------百分比输出值
Alm:○ ● ----------------------报警状态
-------------------------
八、仪表通讯
本仪表具有通讯功能,可在上位机上实现数据采集、参数设定、远程监控等功能。
技术指标:通讯方式:串行通讯RS485,RS232;
波特率:1200 ~ 9600 bps;
